













Description
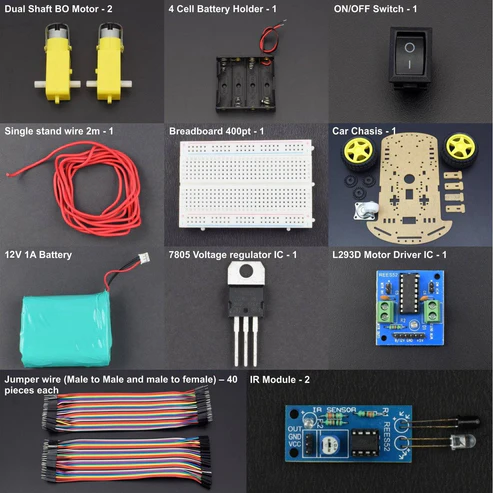
KIT INCLUDES:
- IR Module – 2
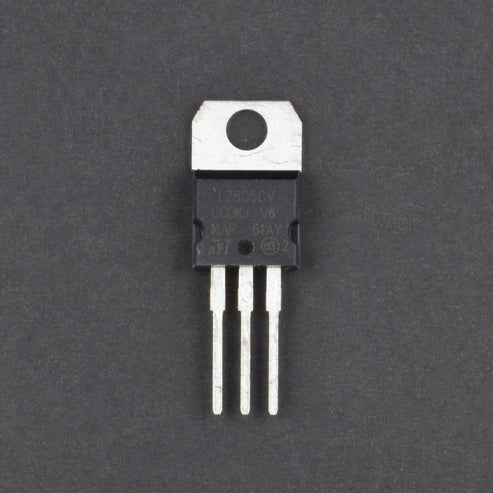
- 7805 Voltage regulator IC – 1
- L293D Motor Driver IC – 1
- ON/OFF SPST Switch – 1
- Dual Shaft BO Motor – 2
- 12V 1A LI-PO Battery – 1
- Jumper wire (Male to Male)-40 PCS
- Jumper Wires (male to female) – 40 pieces
- Single stand wire 2m – 1
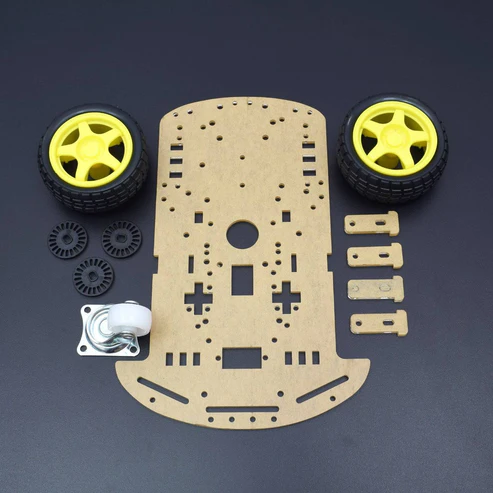
- 2 Wheel Car Chassis KIT – 1
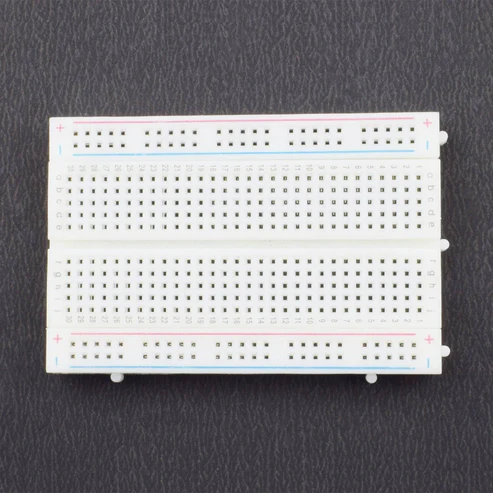
- Breadboard 400 points – 1
HARDWARE REQUIRED
- IR Module – 2
- 7805 Voltage regulator IC – 1
- L293D Motor Driver IC – 1
- ON/OFF SPST Switch – 1
- Dual Shaft BO Motor – 2
- 12V 1A LI-PO Battery – 1
- Jumper wire (Male to Male)-40 PCS
- Jumper Wires (male to female) – 40 pieces
- Single stand wire 2m – 1
- 2 Wheel Car Chassis KIT – 1
- Breadboard 400 points – 1
PIN DESCRIPTION
7805 VOLTAGE REGULATOR

IR SENSOR MODULE

When it detects an obstacle within range it will send an output low.
| VCC | 5V |
| GND | GND |
| OUT | Serial output to signal |
L293D MOTOR DRIVER IC

| Pin No | Function | Name |
| 1 | Enable pin for Motor 1; active high | Enable 1,2 |
| 2 | Input 1 for Motor 1 | Input 1 |
| 3 | Output 1 for Motor 1 | Output 1 |
| 4 | Ground (0V) | Ground |
| 5 | Ground (0V) | Ground |
| 6 | Output 2 for Motor 1 | Output 2 |
| 7 | Input 2 for Motor 1 | Input 2 |
| 8 | Supply voltage for Motors; 9-12V (up to 36V) | Vcc 2 |
| 9 | Enable pin for Motor 2; active high | Enable 3,4 |
| 10 | Input 1 for Motor 1 | Input 3 |
| 11 | Output 1 for Motor 1 | Output 3 |
| 12 | Ground (0V) | Ground |
| 13 | Ground (0V) | Ground |
| 14 | Output 2 for Motor 1 | Output 4 |
| 15 | Input2 for Motor 1 | Input 4 |
| 16 | Supply voltage; 5V (up to 36V) | Vcc 1 |
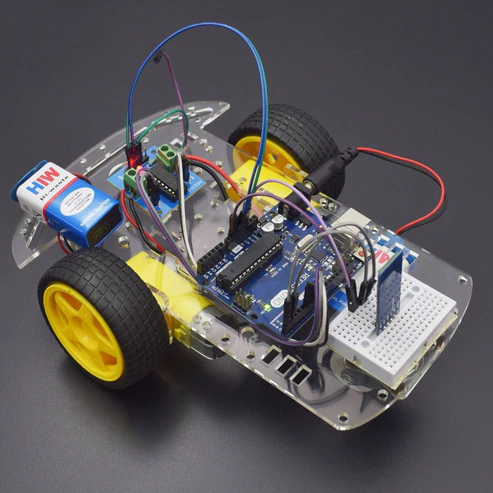
CIRCUIT DESCRIPTION

- Make Positive rail and negative rail on a breadboard by connecting Positive and negative supply.
- Connect L293D Motor Driver IC and 7805 Voltage regulator IC to the Breadboard.
- Connect L293D IC Pin No. 1, 7, 8, 9, 10 & 16 connected to the Pin No. 3 OUT of 7805 IC.
- Connect L293D IC Pin No. 4, 5, 12 & 13 to the GND
- 7805 IC Pin No. 2 is GND and Pin No. 1 connected to the ON/OFF Switch pin 1st, ON/OFF switch pin 2nd connected to the positive supply of LI-PO Battery
- BO Motor 1st connected to the L293D IC Pin No. 11 & 14 and BO Motor 2nd connection to the L293D IC Pin No. 3 & 6.
- IR Module 1st pin vcc connected to the L293D IC Pin no. 9 and GND pin connected to the GND and o/p pin connected to the L293D IC pin no. 15.
- IR Module 2nd pin vcc connected to the L293D IC Pin no. 8 and GND pin connected to the GND and o/p pin connected to the L293D IC pin no. 2.
WORKING
line follower robot follow the line draw on white sheet or an specified path provided by the user. working IR sensor that reflect the light rays to white chart black line absorb the rays and ir sensor provide signal to the LM358 comparator IC that works on the principle.
Block Diagram of the Project
The line follower robot built in this project is divided in to 4 blocks. The following image shows the block diagram for line follower robot.

In this project, we have designed an Arduino based Line Follower Robot. The working of the project is pretty simple: detect the black line on the surface and move along that line. The detailed working is explained here.
As mentioned in the block diagram, we need sensors to detect the line. For line detection logic, we used two IR Sensors, which consists of IR LED and Photodiode. They are placed in a reflective way i.e. side – by – side so that whenever they come in to proximity of a reflective surface, the light emitted by IR LED will be detected by Photo diode.
The following image shows the working of a typical IR Sensor (IR LED – Photodiode pair) in front of a light coloured surface and a black surface. As the reflectance of the light coloured surface is high, the infrared light emitted by IR LED will be maximum reflected and will be detected by the Photodiode.
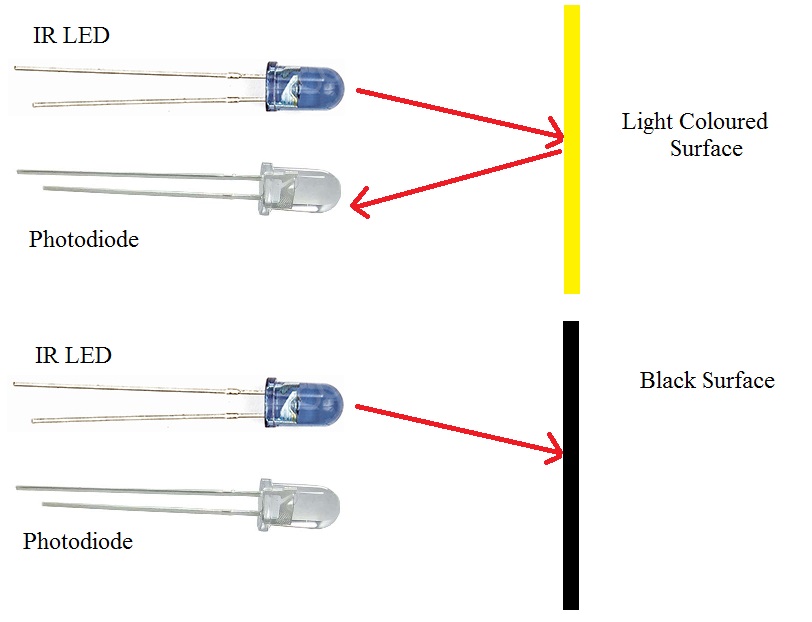
In case of black surface, which has a low reflectance, the light gets completely absorbed by the black surface and doesn’t reach the photodiode.
Using the same principle, we will setup the IR Sensors on the Line Follower Robot such that the two IR Sensors are on the either side of the black line on the floor. The setup is shown below.

When the robot moves forward, both the sensors wait for the line to be detected. For example, if the IR Sensor 1 in the above image detects the black line, it means that there is a right curve (or turn) ahead.
Arduino UNO detects this change and sends signal to motor driver accordingly. In order to turn right, the motor on the right side of the robot is slowed down using PWM, while the motor on the left side is run at normal speed.
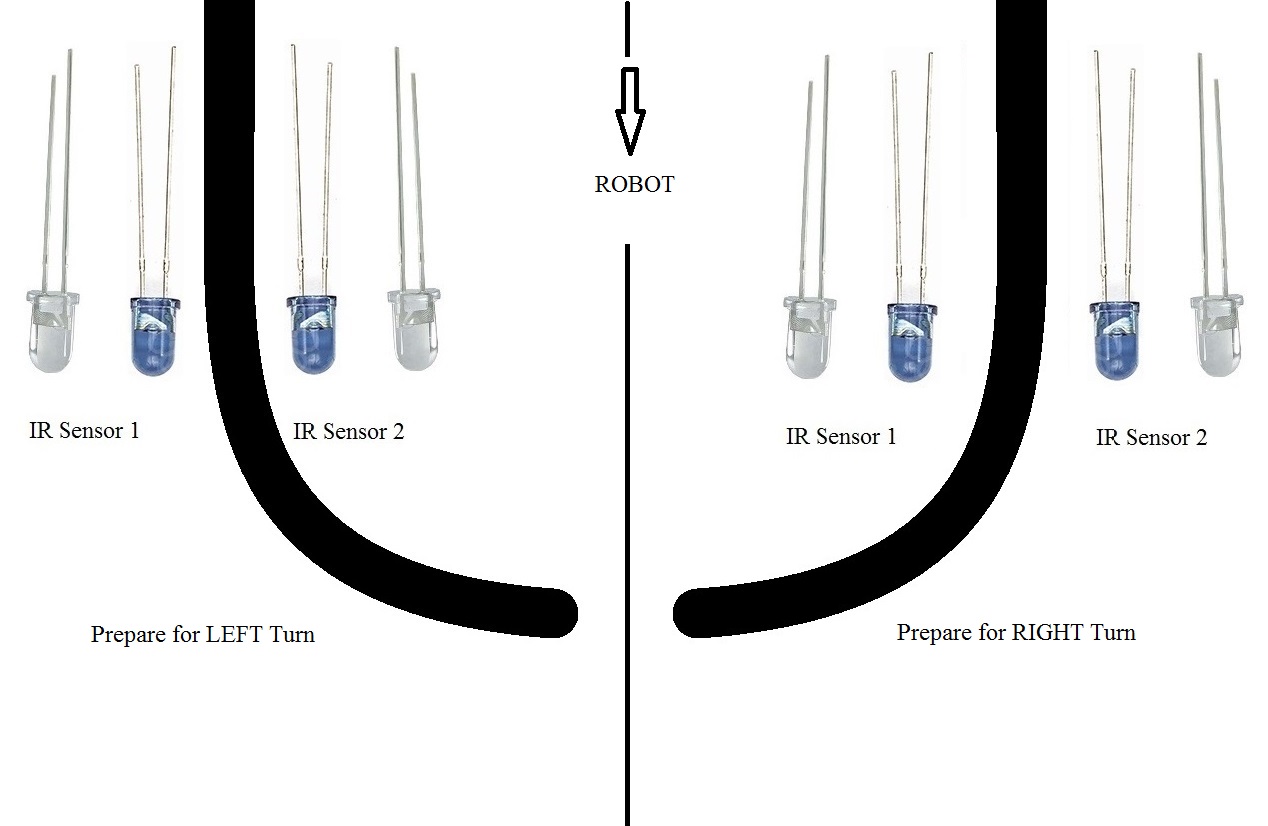
Similarly, when the IR Sensor 2 detects the black line first, it means that there is a left curve ahead and the robot has to turn left. For the robot to turn left, the motor on the left side of the robot is slowed down (or can be stopped completely or can be rotated in opposite direction) and the motor on the right side is run at normal speed.
Arduino UNO continuously monitors the data from both the sensors and turns the robot as per the line detected by them.









 GY-6A 12V 24V 36V 48V Lead Acid Battery 2-15S Lithium Battery Capacity Tester Indicator Digital Voltmeter
GY-6A 12V 24V 36V 48V Lead Acid Battery 2-15S Lithium Battery Capacity Tester Indicator Digital Voltmeter  Bambu Lab A1 Mini 3D Printer
Bambu Lab A1 Mini 3D Printer  5V Mini Stepper Motor 28BYJ-48 Stepper Motor - 5V Unipolar
5V Mini Stepper Motor 28BYJ-48 Stepper Motor - 5V Unipolar  SMD electrolytic Capacitor, 200PCS 10V - 50V 1uF - 470uF 10Values Capacitor Assortment kit Capacitor with Storage Box
SMD electrolytic Capacitor, 200PCS 10V - 50V 1uF - 470uF 10Values Capacitor Assortment kit Capacitor with Storage Box  30 Type Assorted Resistor Kit 600 pcs
30 Type Assorted Resistor Kit 600 pcs  18*30cm Universal PCB Prototype Board 18*30 cm Universal PCB Prototype Board Single-Sided 2.54mm Hole Good For DIY Soldering Electronic Projects Green Thickness
18*30cm Universal PCB Prototype Board 18*30 cm Universal PCB Prototype Board Single-Sided 2.54mm Hole Good For DIY Soldering Electronic Projects Green Thickness  12x18cm Double Sided PCB Board Universal Soldering PCB Board Tinned Through Holes Universal Printed Circuit Proto Board 2.54mm
12x18cm Double Sided PCB Board Universal Soldering PCB Board Tinned Through Holes Universal Printed Circuit Proto Board 2.54mm  E88 PRO RC Drone Without Camera 2.4G 4CH RC Foldable Quadcopter E88 PRO 360° Rolling Stunt Drone Smoothest Flight Controls To Perform Impressive Aerial Stunts
E88 PRO RC Drone Without Camera 2.4G 4CH RC Foldable Quadcopter E88 PRO 360° Rolling Stunt Drone Smoothest Flight Controls To Perform Impressive Aerial Stunts  N20 Gear Motor N20 3V 35 RPM Micro Metal Gear Motor With Encoder N20 Motor
N20 Gear Motor N20 3V 35 RPM Micro Metal Gear Motor With Encoder N20 Motor  Radiolink Byme-DB Flight Controller, 3 axis Gyro stabilizer RC Plane Gyroscope, 4 CH 3 Flight Modes FC, Applicable for Delta Wing, Paper Plane, J10, SU27, F22, for Beginner and Experienced
Radiolink Byme-DB Flight Controller, 3 axis Gyro stabilizer RC Plane Gyroscope, 4 CH 3 Flight Modes FC, Applicable for Delta Wing, Paper Plane, J10, SU27, F22, for Beginner and Experienced  3PI miniQ Car wheel Tyre 42mm N20 DC Gear Motor Wheel
3PI miniQ Car wheel Tyre 42mm N20 DC Gear Motor Wheel  0.4mm 3D Printer Nozzle 0.4mm MK8 M6 Nozzle 3D Printer Nozzles
0.4mm 3D Printer Nozzle 0.4mm MK8 M6 Nozzle 3D Printer Nozzles  150PCS 15 Value 100V 0.33NF- 470NF Polyester Film Capacitor Assortment Kit Plastic Box
150PCS 15 Value 100V 0.33NF- 470NF Polyester Film Capacitor Assortment Kit Plastic Box  Radiolink Byme-D Flight Controller Radiolink Byme-D Stabilizer 3 Channels Flight Controller with Gyroscope 3D Fly FC for Delta Wing Paper Plane
Radiolink Byme-D Flight Controller Radiolink Byme-D Stabilizer 3 Channels Flight Controller with Gyroscope 3D Fly FC for Delta Wing Paper Plane  4.8 kg-cm NEMA17 Stepper Motor NEMA17 4.8 kg-cm Stepper Motor with Detachable 72 CM Cable
4.8 kg-cm NEMA17 Stepper Motor NEMA17 4.8 kg-cm Stepper Motor with Detachable 72 CM Cable  Radiolink Mini PIX Flight Controller Mini Pixhawk Controller Mini Pix APM Flight Controller V1.2 FC for 3-6 Axis FPV Drone/Helicopter/Aircraft/Quad/Car/Boat
Radiolink Mini PIX Flight Controller Mini Pixhawk Controller Mini Pix APM Flight Controller V1.2 FC for 3-6 Axis FPV Drone/Helicopter/Aircraft/Quad/Car/Boat  Horizontal Limit Switch Module Horizontal Mechanical Limit Switch Module 3D Printer Limit Switch Module For Ender 3 Pro With Cable
Horizontal Limit Switch Module Horizontal Mechanical Limit Switch Module 3D Printer Limit Switch Module For Ender 3 Pro With Cable  N20 Gear Motor 6V 400RPM Micro Gear Motor 3mm Shaft High-Torque Gear Motor N20 Micro Metal Gear Motor Powerful N20 Micro Gear Motor for Small Devices
N20 Gear Motor 6V 400RPM Micro Gear Motor 3mm Shaft High-Torque Gear Motor N20 Micro Metal Gear Motor Powerful N20 Micro Gear Motor for Small Devices  SP Racing F3 Flight Controller ACRO Flight Controller F3 Flight Controller For FPV Racing Drones High Performance F3 Flight Controller ACRO Version SP Racing F3 ACRO Flight Controller For RC Drones
SP Racing F3 Flight Controller ACRO Flight Controller F3 Flight Controller For FPV Racing Drones High Performance F3 Flight Controller ACRO Version SP Racing F3 ACRO Flight Controller For RC Drones  Radiolink Byme-A Flight Controller Byme-A V2.0 RC Flight Controller Airplane Stabilizer with Gyro, 6 Flight Modes 4 Channels for A560 Stunt, 3D Fixed-Wing Airplane, Straight Wing, Jet, T-Tail Aircraft and More
Radiolink Byme-A Flight Controller Byme-A V2.0 RC Flight Controller Airplane Stabilizer with Gyro, 6 Flight Modes 4 Channels for A560 Stunt, 3D Fixed-Wing Airplane, Straight Wing, Jet, T-Tail Aircraft and More  S500 Quadcopter Frame FPV Frame Multi Rotor Air PCB Frame With High Landing Gear For FPV Quad-Copter Frame With High Landing Gear - OG Carbon Fiber
S500 Quadcopter Frame FPV Frame Multi Rotor Air PCB Frame With High Landing Gear For FPV Quad-Copter Frame With High Landing Gear - OG Carbon Fiber  170 Tie Point Mini Self-Adhesive Solderless Breadboard
170 Tie Point Mini Self-Adhesive Solderless Breadboard  Radiolink CrossRace V1.0 Flight Controller High Performance CrossRace APM Flight Controller Stack OSD Integrated For DJI HD VTX System For RC Drone
Radiolink CrossRace V1.0 Flight Controller High Performance CrossRace APM Flight Controller Stack OSD Integrated For DJI HD VTX System For RC Drone  Raspberry Pi Compute Module 4 - CM4102008- 2GB RAM - 8GB eMMC - Wireless
Raspberry Pi Compute Module 4 - CM4102008- 2GB RAM - 8GB eMMC - Wireless
Reviews
There are no reviews yet.